
轨迹传感器
《数字传感器:轨迹传感器》
数字信号是指某些传感器提供两种不同状态的信号:高电平或低电平,开或关,逻辑1或逻辑0。数字信号是编程中最容易处理的信号类型。
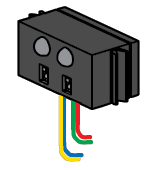
轨迹传感器的内部是由两个单独的传感器组成的有源设备,需要一个额外的9V电源供电。
|
ID
|
名称
|
中文名称
|
数量
|
图片
|
|
1
|
TX Controller
|
TX控制器
|
1
|
|
|
2
|
Power Supply
|
电源
|
1
|
|
|
3
|
Wires
|
电线
|
2
|
|
|
4
|
Trail Follower Sensor
|
轨迹传感器
|
1
|
 |
|
5
|
Lamp
|
LED灯(带灯座)
|
2
|
|
|
6
|
Building Block 15
|
15mm构建块
|
1
|
|
|
7
|
Building Block 30
|
30mm构建块
|
2
|
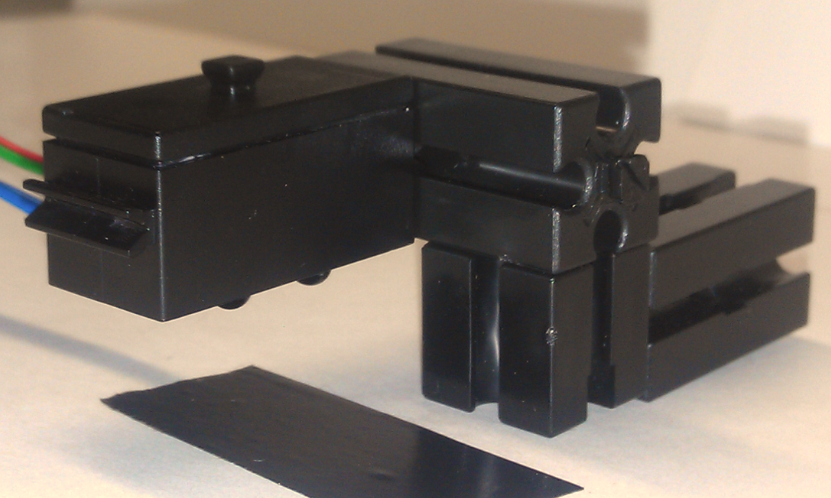
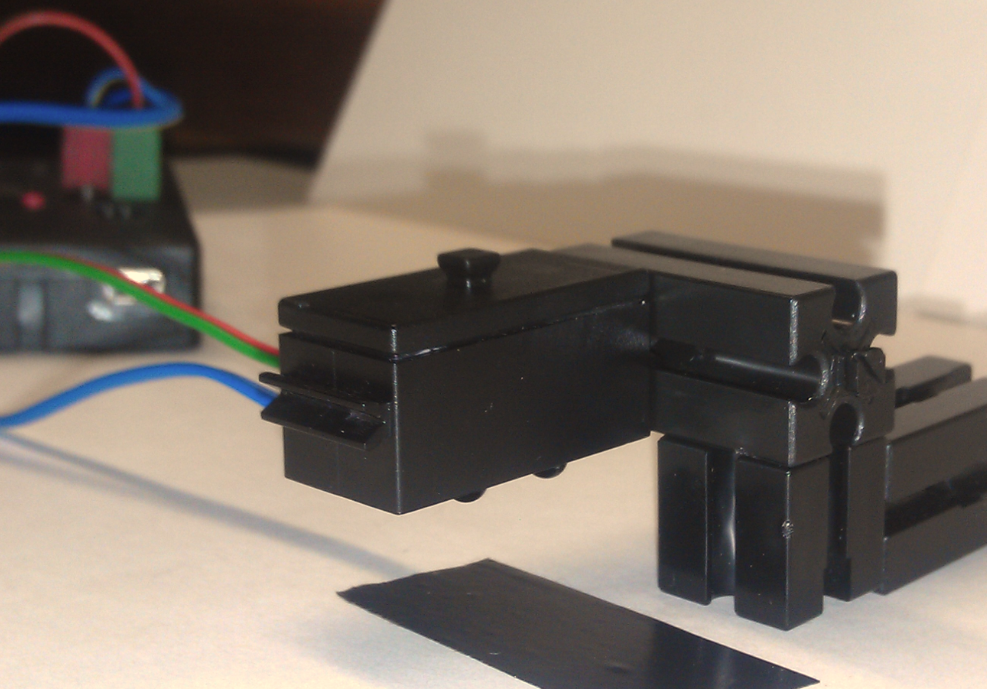
轨迹传感器需要相当接近它要遵循的线条。 在该示例中,构建小型装置以安装传感器,保持距离桌面表面约15mm,如下图所示:

将轨迹传感器安装到组件上,确保传感器的“眼睛”指向下方,将一条电工胶带粘贴在纸张上,如下图所示:
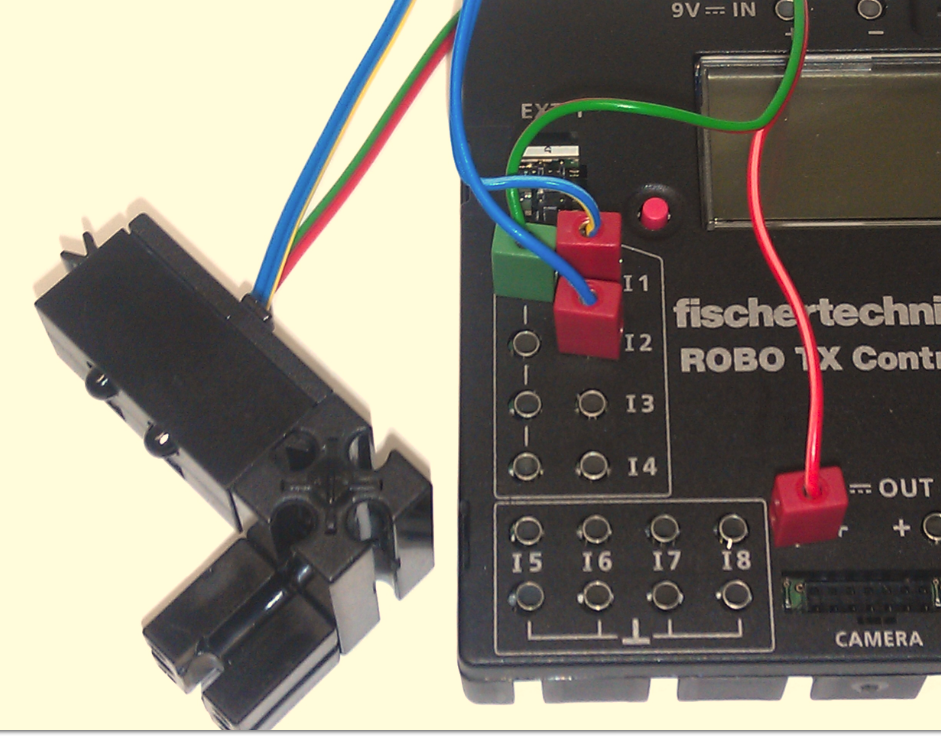
轨迹传感器一共有四根电线,红色电线需要接到控制器上的9V电源输出,绿色电线可以接到控制器上的任何“地”,本例中,接到I1输入端子组中的“地”:

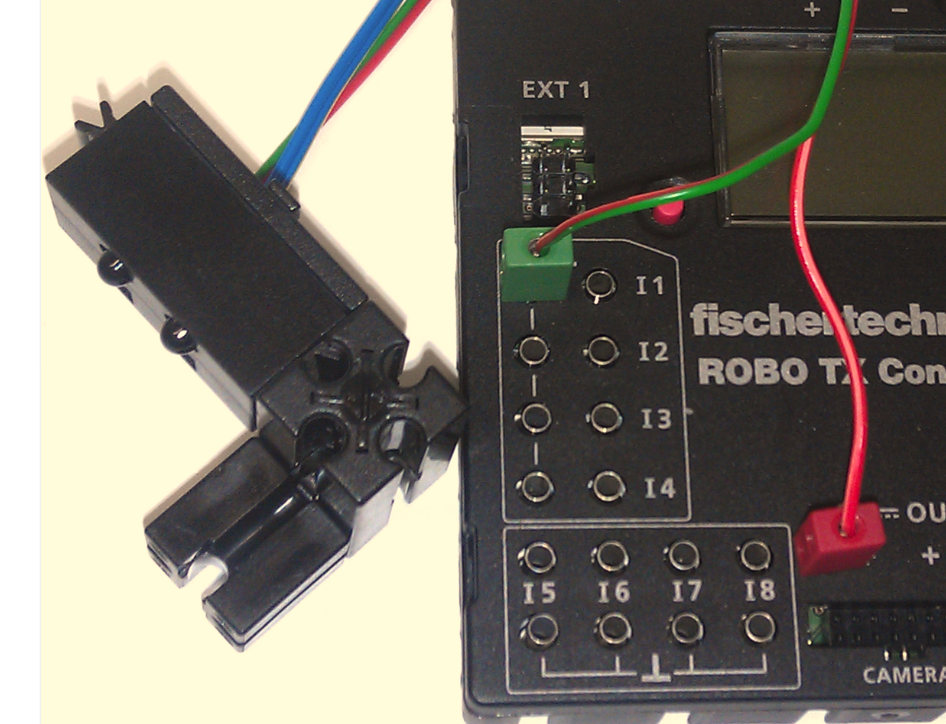
传感器上的另外两根电线是信号线,现在,将蓝黄条纹电线连接到I1端子,将蓝色电线连接到I2端子:
将轨迹传感器放置在电工胶带的正上方,如下图所示:
现在,我们将轨迹传感器在电工胶带上方进行左右小幅度的移动,在接口测试窗口中观察,I1和I2在什么时候显示0,什么时候显示1。
调换I1和I2上的导线,观察反接导线对传感器的工作是否有影响?
通过测试,我们得知,轨迹传感器上的两组内置传感器(一个圆形的光纤发射器和一个方形的光线接收器是一组)的工作方式是一样的,即:当置于黑色电工胶带上方时,信号返回为“0”,当移动至白色纸张上方时,信号返回为“1”。
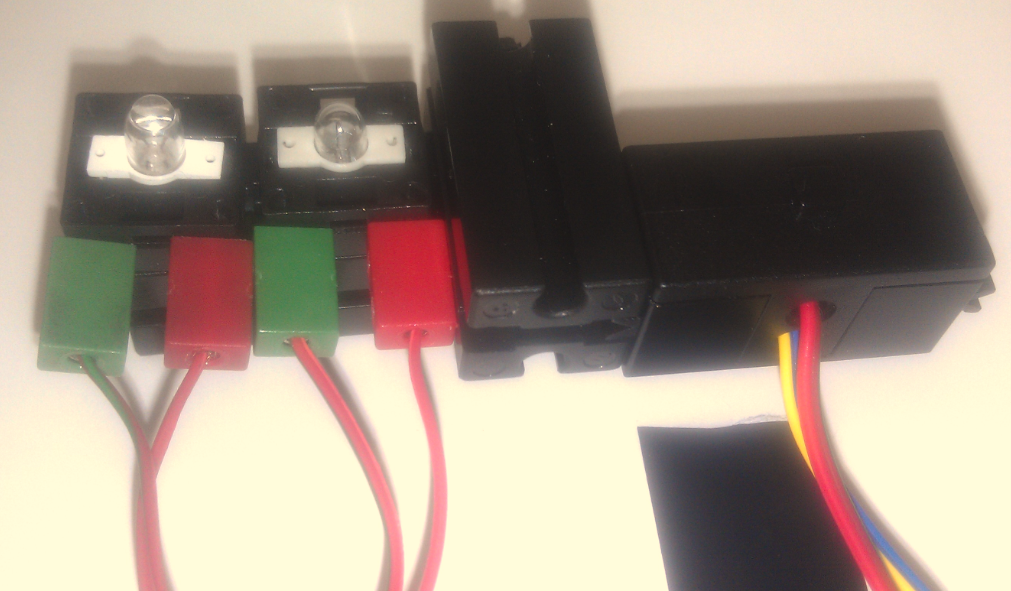
接下来,我们要改装测试装置,在控制器的M1和M2输出端口上添加LED灯泡,您可以将它们并列安装在传感器的支架上,如下图所示:
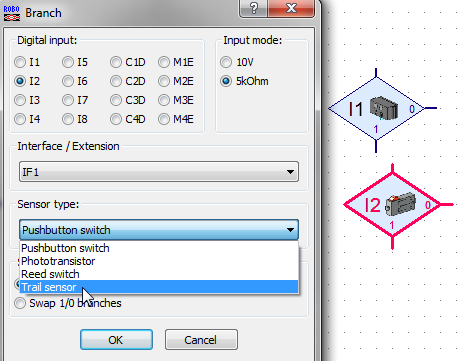
拖拽“数字分支”模块到编程窗口,右键单击模块,调出属性设置面板,将数字输入端口设置为I1和I2,将传感器类型设置为“Trail sensor”(轨迹传感器),如下图所示:
- 实验设备:
- 实验流程:
-
-
在RoboPro创建一个新文件。设置环境为TX/TXT控制器,使用级别为初学者,在【COM / USB】设置窗口中设置为USB连接、TX控制器类型。
-
-
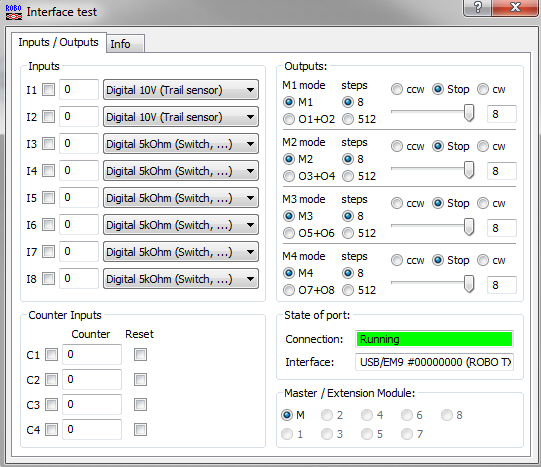
之后,在ROBO Pro软件的接口测试窗口中进行正确的传感器输入类型设置,本实验中,我们将I1和I2的输入端口类型都设置为“Digital 10V(Trail sensor)”,如下图所示:
-
-
实验结论
-
-
编写程序
-
-
-
-
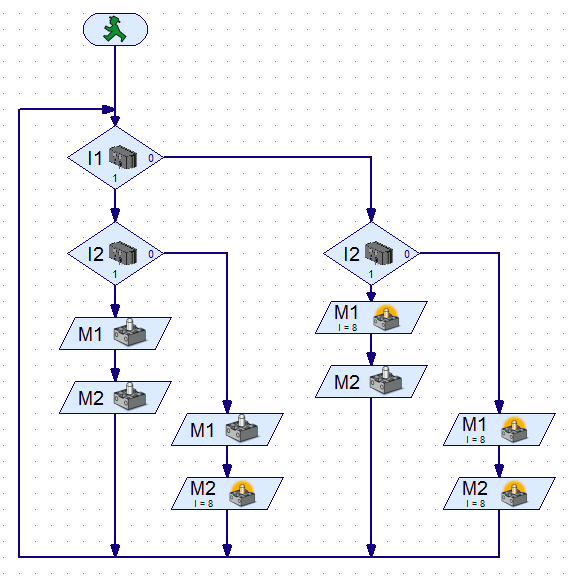
接下来拖拽其他模块,将程序编写为下面的样子:
-
-
-
-
程序中LED灯的点亮有四种可能的逻辑,这些逻辑将通过左右移动轨迹传感器而看到效果。
- 下面是真值表,请通过运行程序检验逻辑,以确保LED灯在四种情况下都能正常的点亮(如有问题,请检查LED灯的接线)。
-
-

-
-
现在,开始进行程序测试,左右小幅度地移动轨迹传感器,观察并记录测试结果。

