
光电晶体管
《数字传感器:光电晶体管》
|
ID
|
名称
|
中文名称
|
数量
|
图片
|
|
1
|
TX Controller
|
TX控制器
|
1
|
|
|
2
|
Power Supply
|
电源
|
1
|
|
|
3
|
Wires
|
电线
|
2
|
|
|
4
|
Phototransistor
|
光电晶体管
|
1
|
 |
|
5
|
Lamp
|
LED灯(带灯座)
|
2
|
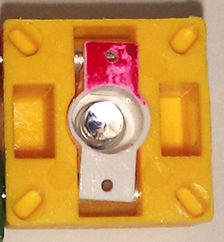
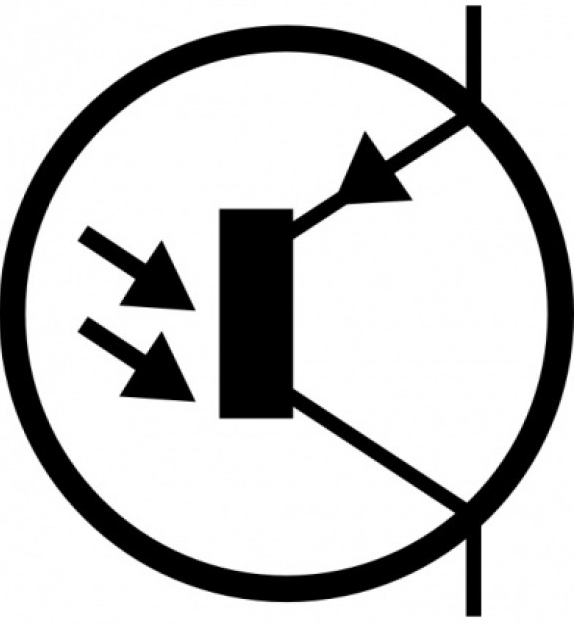
开关是安装在电路中控制电流流过的物理装置。而光敏三极管(光电晶体管)是一个快速的半导体开关装置。没有光线照射时,它是常开开关,当被光线照射时,它就被导通,直到光线不再存在。光敏三极管如下图所示:
因为它是半导体器件,所以极性是至关重要的。晶体管上有红色标记的一端是集电极:
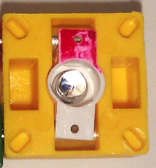
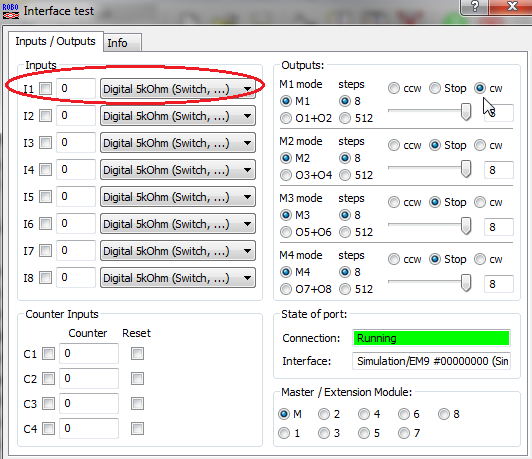
红色的一端应该通过红色的电线连接到TX控制器输入端口中的正输入端,下图中画圈的部分是正输入端:

另一端则需要接地,TX控制器带有接地符号的端口都是“接地电位”端,如下图所示:

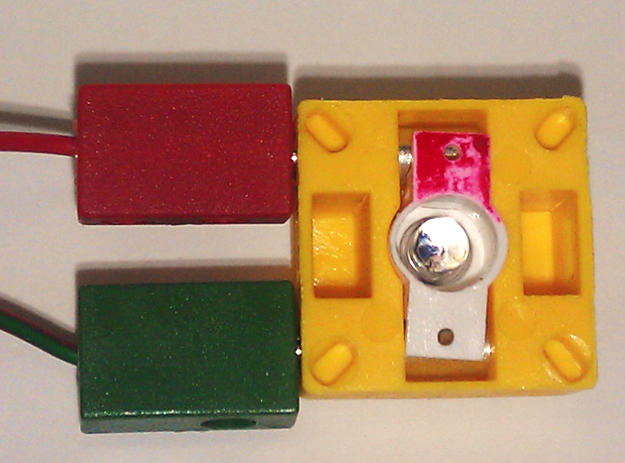
现在,将光电晶体管正确的接到TX控制器上的I1端口,然后让一个LED灯接到M1端口上:

在接口测试面板中,点击M1模式里的 CW选项,这时你连接的LED灯将点亮:
移动LED光源,使其光线直接照射在光电晶体管上,观察此时I1输入端的信号发什么了什么变化。
在RoboPro创建一个新文件。设置环境为TX/TXT控制器,使用级别为初学者,在【COM / USB】设置窗口中设置为USB连接、TX控制器类型。
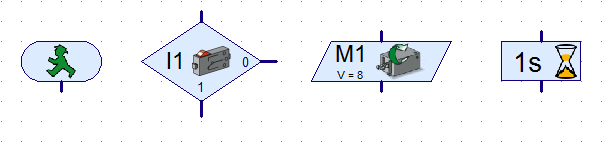
之后,将下面的这些模块拖拽至编程窗口中:
点击鼠标左键框选“马达输出”模块和“时间延迟”模块:
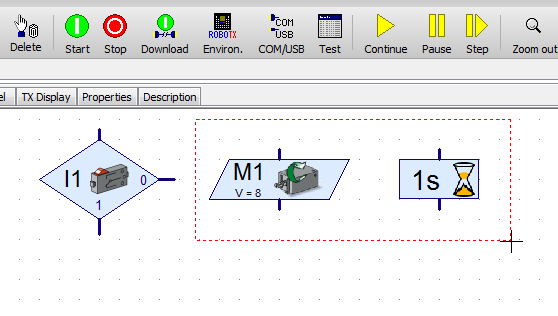
松开鼠标后这两个模块将红色高亮显示:
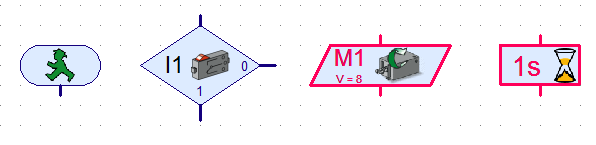
将鼠标移到已经选区的模块上,此时鼠标箭头变为小手的形状,点击鼠标左键(此时小手的右下方出现一个黑色的十字图标)进行拖拽,这样便复制除了一组新的模块:
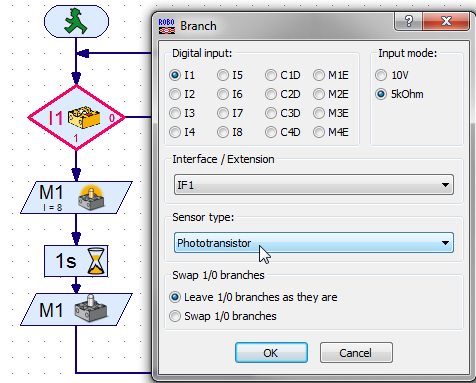
右键单击“数字分支”模块,在其属性面板中,将其传感器类型设置为“Phototransistor”:
分别右键单击“马达输出”模块,设置它们的图标显示为“Lamp”。然后设置一个的动作为“On”一个的工作为“Off”:
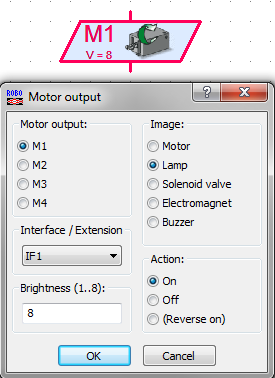
将另一个LED灯接到TX控制器上的M2输出端,在编程窗口中再复制一个“马达输出”模块,设置其显示图标为“Lamp”,动作为“On”。
最终你的整体程序应为下图所示:
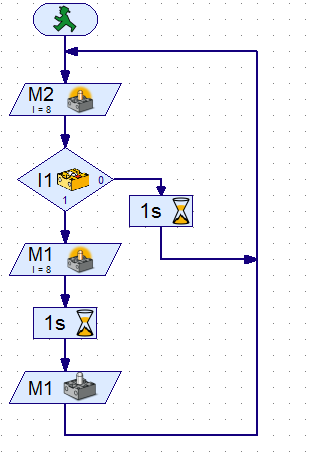
测试这个程序,这个程序的意思是,当我们用M2上的LED灯去照射I1上的光电晶体管时,由于光电晶体管受到光照导通,产生高电平信号(1),此时M1上的LED灯点亮,1秒中后熄灭。观察这个过程,如果有问题请检查电路连接。
- 实验设备:
- 实验流程:
-
-
之后,在ROBO Pro软件的接口测试窗口中进行正确的传感器输入类型设置,本实验中,我们将I1输入端口的类型设置为“Digital 5kOhm(Switch)”,如下图所示:
- 程序编写:

